

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
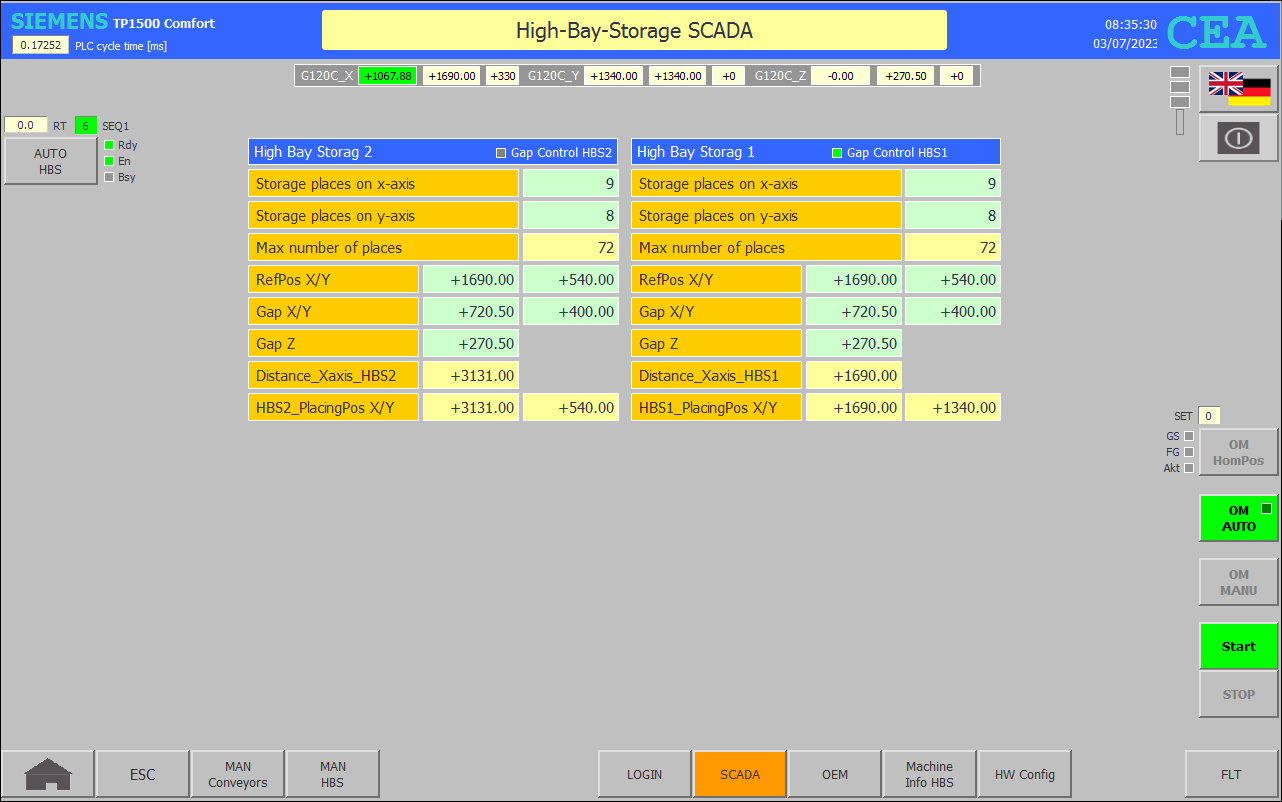
OB100 Startup : Two Aisle Automated Small Parts Storage |
|
|
|
|
|
Netzwerk 1: Pre-Setting during Complete Restart // Log-In run-time "DI MAIN GLB".M00.TON_Login.PT := t#120s; "DI MAIN GLB".#M00.ProductCounter.DlyOnReset.PT := t#2s; // Fixed Parameters HBS1/HBS2 "DI OUT P03".Manual.Axis_XYZ.TrgtFixPos[0].X := 0.0; // Homing point (5.Ref.point) "DI OUT P03".Manual.Axis_XYZ.TrgtFixPos[0].Y := 0.0; // Homing point "DI OUT P03".Manual.Axis_XYZ.TrgtFixPos[0].Z := 0.0; // Homing point "DI OUT P03".Manual.Axis_XYZ.TrgtFixPos[1].X := 0.0; // Loading position HSB1 "DI OUT P03".Manual.Axis_XYZ.TrgtFixPos[1].Y := 940.0; // Loading position HSB1 "DI OUT P03".Manual.Axis_XYZ.TrgtFixPos[1].Z := 0.0; // Loading position HSB1 "DI OUT P03".Manual.Axis_XYZ.TrgtFixPos[2].X := 0.0; // Discharging position HSB2 "DI OUT P03".Manual.Axis_XYZ.TrgtFixPos[2].Y := 940.0; // Discharging position HSB2 "DI OUT P03".Manual.Axis_XYZ.TrgtFixPos[2].Z := 0.0; // Discharging position HSB2 "DI OUT P03".Manual.Axis_XYZ.TrgtFixPos[3].X := 830.0; // Maintenance position "DI OUT P03".Manual.Axis_XYZ.TrgtFixPos[3].Y := 1170.0; // Maintenance position "DI OUT P03".Manual.Axis_XYZ.TrgtFixPos[3].Z := 720.50; // Maintenance position "DI OUT P03".Manual.G120C_X.TchInVelo_0 := 0.1; // Homing velocity "DI OUT P03".Manual.G120C_Y.TchInVelo_0 := 0.1; // Homing velocity "DI OUT P03".Manual.G120C_Z.TchInVelo_0 := 0.1; // Homing velocity "DI OUT P03".Manual.G120C_X.TchInVelo_1 := 330.0; // Work velocity "DI OUT P03".Manual.G120C_Y.TchInVelo_1 := 300.0; // Work velocity "DI OUT P03".Manual.G120C_Z.TchInVelo_1 := 200.0; // Work velocity // MaPa HBS1 "ModulDa".MaPa.HBS1.RefPos.X := 1690.0; "ModulDa".MaPa.HBS1.RefPos.Y := 540.0; "ModulDa".MaPa.HBS1.RefPos.Z := 0.0; "ModulDa".MaPa.HBS1.Gap.X := 720.5; "ModulDa".MaPa.HBS1.Gap.Y := 400.0; "ModulDa".MaPa.HBS1.Gap.Z := 270.5; "ModulDa".MaPa.HBS1.NoOf_Places_X := 9; "ModulDa".MaPa.HBS1.NoOf_Places_Y := 8; "ModulDa".MaPa.HBS1.MaxNoPlaces := "ModulDa".MaPa.HBS1.NoOf_Places_X * "ModulDa".MaPa.HBS1.NoOf_Places_Y; // MaPa HBS2 "ModulDa".MaPa.HBS2.RefPos.X := 1690.0; "ModulDa".MaPa.HBS2.RefPos.Y := 540.0; "ModulDa".MaPa.HBS2.RefPos.Z := 0.0; "ModulDa".MaPa.HBS2.Gap.X := 720.5; "ModulDa".MaPa.HBS2.Gap.Y := 400.0; "ModulDa".MaPa.HBS2.Gap.Z := 270.5; "ModulDa".MaPa.HBS2.NoOf_Places_X := 9; "ModulDa".MaPa.HBS2.NoOf_Places_Y := 8; "ModulDa".MaPa.HBS2.MaxNoPlaces := "ModulDa".MaPa.HBS2.NoOf_Places_X * "ModulDa".MaPa.HBS2.NoOf_Places_Y; // G120C_X "DI OUT P03".G120C_X.DRV.Support.SW_EndLim_MinPos := -750.2; "DI OUT P03".G120C_X.DRV.Support.SW_EndLim_MaxPos := 8900; // G120C_Y "DI OUT P03".G120C_Y.DRV.Support.SW_EndLim_MinPos := -94.7; "DI OUT P03".G120C_Y.DRV.Support.SW_EndLim_MaxPos := 3900.6; // G120C_Z "DI OUT P03".G120C_Z.DRV.Support.SW_EndLim_MinPos := -1600; "DI OUT P03".G120C_Z.DRV.Support.SW_EndLim_MaxPos := 1600; |
|