

|
OB100 Startup : Complete restart |
|
|
|
|
|
Netzwerk 1: write default values
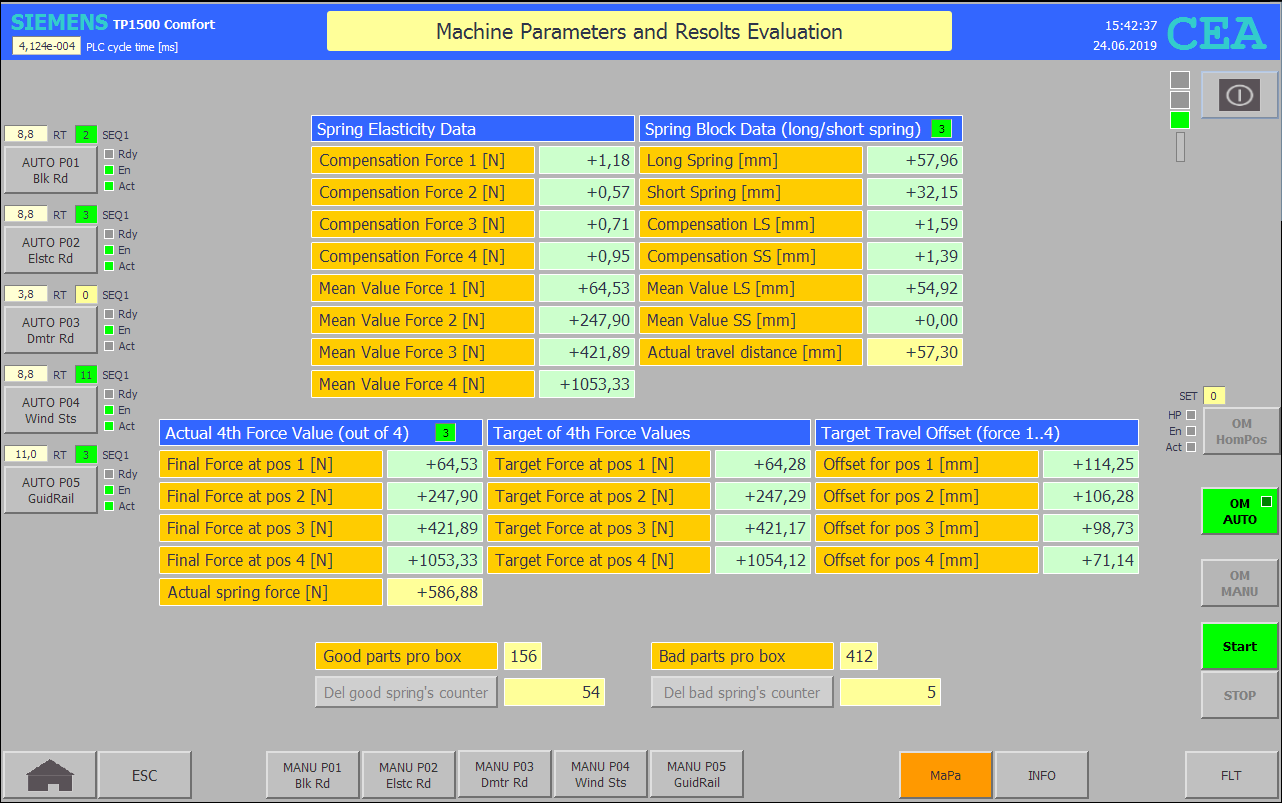
// M5_Z Elasticity servo drive "DI OUT P02".MANUAL.M5_Z.ManuVelocity_2 := 10; "DI OUT P02".M5_Z.DRV.Support.SW_EndLim_MinPos := -30.0; "DI OUT P02".M5_Z.DRV.Support.SW_EndLim_MaxPos := 135.0; "DI OUT P02".MANUAL.M5_Z.Set_TchInVelo_0 := 100.0; "DI OUT P02".MANUAL.M5_Z.Set_TchInVelo_1 := 50.0; // Master piece long/short spring block "DI OUT P01".MANUAL.SpringBLK_LS.Offset := 57.96; "DI OUT P01".MANUAL.SpringBLK_SS.Offset := 32.15; // Master piece expected force sensor at a certain position "DI OUT P02".MANUAL.SpringFRC_F1.TrgtValue := 64.28; //Force F1 at L1 "DI OUT P02".MANUAL.SpringFRC_F2.TrgtValue := 247.29; // Force F2 at L2 "DI OUT P02".MANUAL.SpringFRC_F3.TrgtValue := 422.53; // Force F3 at L3 "DI OUT P02".MANUAL.SpringFRC_F4.TrgtValue := 1052.62; // Force F4 at L4 // Master piece at target L1..L4 "DI OUT P02".MANUAL.M5_Z.Set_TchInPos_0 := 60.0; // HP "DI OUT P02".MANUAL.M5_Z.Set_TchInPos_1 := 70.0; // HP "DI OUT P02".MANUAL.SpringFRC_F1.Offset := 114.25; // L1 "DI OUT P02".MANUAL.SpringFRC_F2.Offset := 106.28; // L2 "DI OUT P02".MANUAL.SpringFRC_F3.Offset := 98.73; // L3 "DI OUT P02".MANUAL.SpringFRC_F4.Offset := 71.14; // L4 "DI OUT P02".MANUAL.M5_Z.Set_TchInPos_5 := 117.0; // Lmax // Compensation Force "DI OUT P02".MANUAL.SpringFRC_F1.Compensation := 1.18; "DI OUT P02".MANUAL.SpringFRC_F2.Compensation := 0.57; "DI OUT P02".MANUAL.SpringFRC_F3.Compensation := 0.71; "DI OUT P02".MANUAL.SpringFRC_F4.Compensation := 0.95; // Compensation Travel "DI OUT P01".MANUAL.SpringBLK_LS.Compensation := 0.52; "DI OUT P01".MANUAL.SpringBLK_SS.Compensation := 0.39; // SetVal of module runtime "DI MAIN P01".MaDa.RunTimeSetP_seq1 := 148; "DI MAIN P02".MaDa.RunTimeSetP_seq1 := 134; "DI MAIN P03".MaDa.RunTimeSetP_seq1 := 41; "DI MAIN P04".MaDa.RunTimeSetP_seq1 := 111; "DI MAIN P05".MaDa.RunTimeSetP_seq1 := 233; // SetVal good springs box "DatOfMod".GLB.STS.RunTimeCntr_seq3 := 200; // SetVal bad springs box "DatOfMod".GLB.STS.RunTimeCntr_seq4 := 150; |
|
|
|
|
|
Netzwerk 1: Pre-setting ifm-Camera 1
"O2VxCfgSetPN"(iiConnID := 5, iiIPAddr1 := 192, iiIPAddr2 := 168, iiIPAddr3 := 0, iiIPAddr4 := 6, idiPortNo := 50010, iiTimeOut := 6000, iiHwTrigMode := 0, ianyRcvBuf := "HMI SYS".CAM1.RcvBufO2Vx, oudtCfgData => "HMI SYS".CAM1.OUT.oudtCfgData); |
|
|
|
|
|
Netzwerk 2: Pre-setting ifm-Camera 2
"O2VxCfgSetPN"(iiConnID := 6, iiIPAddr1 := 192, iiIPAddr2 := 168, iiIPAddr3 := 0, iiIPAddr4 := 7, idiPortNo := 50010, iiTimeOut := 6000, iiHwTrigMode := 0, ianyRcvBuf := "HMI SYS".CAM2.RcvBufO2Vx, oudtCfgData => "HMI SYS".CAM2.OUT.oudtCfgData); |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|