



|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
OB100 Startup : Global Complete Restart |
|
|
|
|
|
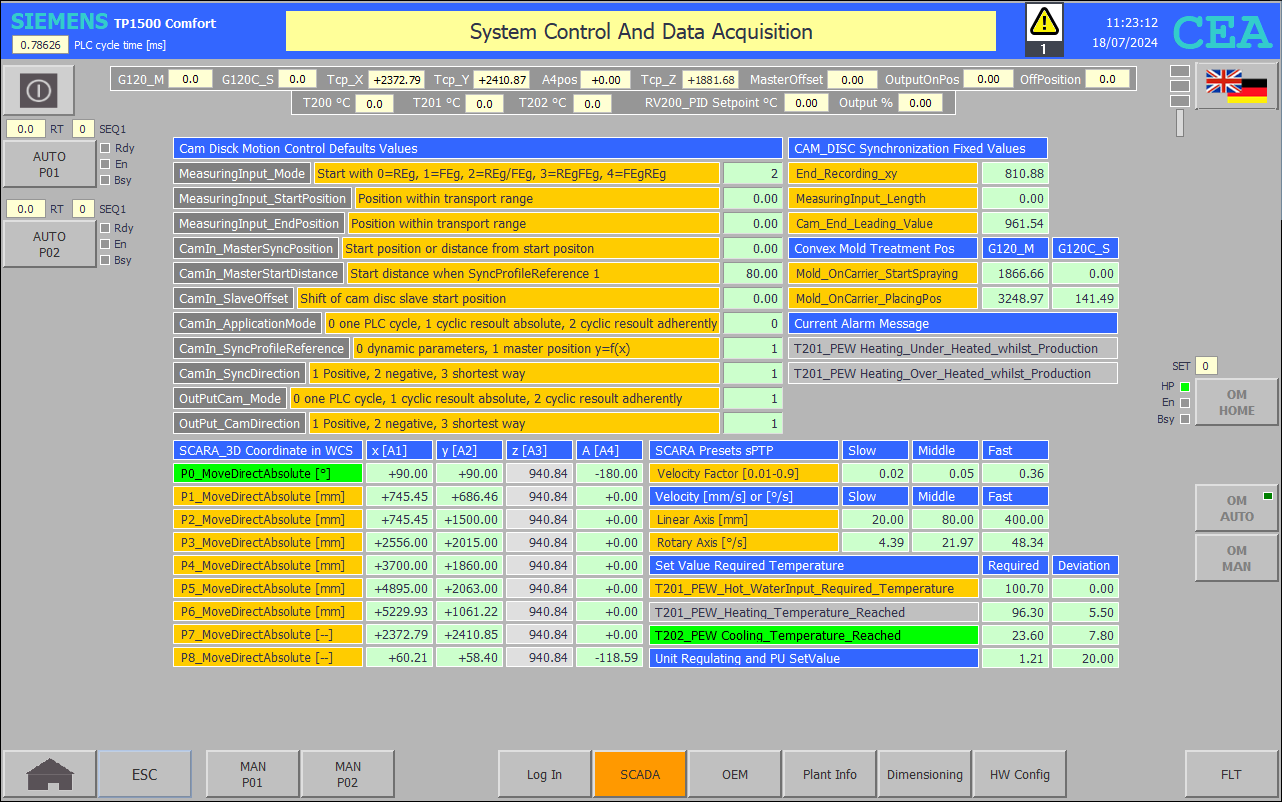
Network 1: Fixed Values Pre-Setting // Log-In run-time "DI MAIN GLB".M00.TON_Login.PT := t#120s; "DI MAIN GLB".#M00.ProductCounter.DlyOnReset.PT := t#1.5s; // G120_M Convex master mold back and forth conveyor "DI OUT P01".G120_M.DRV.Support.SW_EndLim_MinPos := "+1-G120_M".PositionLimits_SW.MinPosition + 10.0; "DI OUT P01".G120_M.DRV.Support.SW_EndLim_MaxPos := "+1-G120_M".PositionLimits_SW.MaxPosition - 10.0; // G120C_S G120C_S Master Mold Silicon Spreader "DI OUT P01".G120C_S.DRV.Support.SW_EndLim_MinPos := "+1-G120C_S".PositionLimits_SW.MinPosition + 4.5; "DI OUT P01".G120C_S.DRV.Support.SW_EndLim_MaxPos := "+1-G120C_S".PositionLimits_SW.MaxPosition - 4.04; // +1-S120_M1 Pick & Place Master Articulated Arm A1 "DI OUT P01".S120_M1.DRV.Support.SW_EndLim_MinPos := "+1-S120_M1".PositionLimits_SW.MinPosition + 5.0; "DI OUT P01".S120_M1.DRV.Support.SW_EndLim_MaxPos := "+1-S120_M1".PositionLimits_SW.MaxPosition - 5.0; // +1-S120_S1 Pick & Place Master Articulated Arm A1 "DI OUT P01".S120_S1.DRV.Support.SW_EndLim_MinPos := "+1-S120_S1".PositionLimits_SW.MinPosition; "DI OUT P01".S120_S1.DRV.Support.SW_EndLim_MaxPos := "+1-S120_S1".PositionLimits_SW.MaxPosition; "DI OUT P01".S120_S1.DRV.MC_GearIn.RatioNumerator := -1; "DI OUT P01".S120_S1.DRV.MC_GearIn.RatioDenominator := 1; // +1-S120_M2 Pick & Place Master Articulated Arm A2 "DI OUT P01".S120_M2.DRV.Support.SW_EndLim_MinPos := "+1-S120_M2".PositionLimits_SW.MinPosition + 10.0; "DI OUT P01".S120_M2.DRV.Support.SW_EndLim_MaxPos := "+1-S120_M2".PositionLimits_SW.MaxPosition - 10.0; // +1-S120_S2 Pick & Place Master Articulated Arm A2 "DI OUT P01".S120_S2.DRV.Support.SW_EndLim_MinPos := "+1-S120_S2".PositionLimits_SW.MinPosition; "DI OUT P01".S120_S2.DRV.Support.SW_EndLim_MaxPos := "+1-S120_S2".PositionLimits_SW.MaxPosition; "DI OUT P01".S120_S2.DRV.MC_GearIn.RatioNumerator := -1; "DI OUT P01".S120_S2.DRV.MC_GearIn.RatioDenominator := 1; // +1-S210_M4 Pick & Place Rotary Vaccum Gripper A4 "DI OUT P01".S210_M4.DRV.Support.SW_EndLim_MinPos := "+1-S210_M4".PositionLimits_SW.MinPosition; "DI OUT P01".S210_M4.DRV.Support.SW_EndLim_MaxPos := "+1-S210_M4".PositionLimits_SW.MaxPosition; // +1-S210_S4 Pick & Place Rotary Vaccum Gripper A4 "DI OUT P01".S210_S4.DRV.Support.SW_EndLim_MinPos := "+1-S210_S4".PositionLimits_SW.MinPosition; "DI OUT P01".S210_S4.DRV.Support.SW_EndLim_MaxPos := "+1-S210_S4".PositionLimits_SW.MaxPosition; "DI OUT P01".S210_S4.DRV.MC_GearIn.RatioNumerator := -1; "DI OUT P01".S210_S4.DRV.MC_GearIn.RatioDenominator := 1; // T200_PEW Hot Water Output Temperature [°C] "DI OUT P02".T200_PEW.Support.High_Lim := 120.0; "DI OUT P02".T200_PEW.Support.Low_Lim := 0.0; // T201_PEW Hot Water Input Temperature "DI OUT P02".T201_PEW.Support.High_Lim := 115.0; "DI OUT P02".T201_PEW.Support.Low_Lim := 0.0; // T202_PEW Cold Water Output Temperature "DI OUT P02".T202_PEW.Support.High_Lim := 100.0; "DI OUT P02".T202_PEW.Support.Low_Lim := 0.0; // HMI SetValues "HMI KEY".SetValues.T200_PEW_Hot_Heating_Input_Required_Temperature := 100.7; "HMI KEY".SetValues.T201_PEW_Hot_Heating_Output_Required_Temperature := 96.3; "HMI KEY".SetValues.T202_PEW_Cold_Heating_Output_Required_Temperature := 23.6; "HMI KEY".SetValues."T201 Temperature_Deviation" := 5.5; "HMI KEY".SetValues."T202 Temperature_Deviation" := 7.8; "HMI KEY".SetValues.Scal_PE_Unit_PU_SET_VAL := 20.0; // Factor "HMI KEY".SetValues.Scal_PE_Unit_Regulating_Factor := 1.21; // Factor "HMI KEY".SetValues.FIT200_Hot_Water_Flow := "HMI KEY".SetValues.FIT201_Cold_Water_Flow := 0.0; // RV200_PID "DI OUT P02".RV200_PID.Support.ManualValue := 80.7; |
|
|
|
|
|
Network 2: HMI SetValues Pre-Setting "HMI KEY".SetValues.SCARA_3D_VelocityFactor_Slow := 4.39; "HMI KEY".SetValues.SCARA_3D_VelocityFactor_Middle := 21.97; "HMI KEY".SetValues.SCARA_3D_VelocityFactor_Fast := 87.89; "HMI KEY".SetValues.Rotary_Axis_Slow := 100.0; "HMI KEY".SetValues.Rotary_Axis_Fast := 400.0; |
|
|
|
|
|
Network 3: CAM_DISC Machine - Default Pre-Setting (OEM) "HMI KEY".CamDisc_Machine.Cam_End_Leading_Value := 961.53846; "HMI KEY".CamDisc_Machine.Mold_OnCarrier_End_Recording_xy := 810.88; "HMI KEY".CamDisc_Machine.Mold_OnCarrier_StartMeasuringInput := 876.19; "HMI KEY".CamDisc_Machine.Mold_OnCarrier_StartSpraying_x := 1866.66; "HMI KEY".CamDisc_Machine.Mold_onCarrier_StartSpraying_y := 0.0; "HMI KEY".CamDisc_Machine.Mold_onCarrier_PlacingPos_x := 3248.97; "HMI KEY".CamDisc_Machine.Mold_onCarrier_PlacingPos_y := 141.49; |
|
|
|
|
|
Network 4: CAM_DISC Pre-setting (SCADA default) "DI OUT P01".CAM_DISC.CAM.MC_MeasuringInput.Mode := 2; // REg+FEg "DI OUT P01".CAM_DISC.CAM.MC_MeasuringInput.MeasuringRange := FALSE; "DI OUT P01".CAM_DISC.CAM.MC_MeasuringInput.StartPosition := 0.0; "DI OUT P01".CAM_DISC.CAM.MC_MeasuringInput.EndPosition := 0.0; // full range "DI OUT P01".CAM_DISC.CAM.MC_CamIn.MasterSyncPosition := 0.0; "DI OUT P01".CAM_DISC.CAM.MC_CamIn.MasterStartDistance := 80.0; "DI OUT P01".CAM_DISC.CAM.MC_CamIn.ApplicationMode := 0; // one plc cycle "DI OUT P01".CAM_DISC.CAM.MC_CamIn.SyncDirection := 1; // positive, default=3 shortest war "DI OUT P01".CAM_DISC.CAM.MC_CamIn.SlaveOffset := 0.0; "DI OUT P01".CAM_DISC.CAM.MC_CamIn.SyncProfileReference := 1; "DI OUT P01".CAM_DISC.CAM.MC_CamIn.Velocity := -1.0; "DI OUT P01".CAM_DISC.CAM.MC_CamIn.MasterScaling := 1.0; "DI OUT P01".CAM_DISC.CAM.MC_CamIn.SlaveScaling := 1.0; "DI OUT P01".CAM_DISC.CAM.MC_OutputCam.Direction := 1; "DI OUT P01".CAM_DISC.CAM.MC_OutputCam.Mode := 1; "DI OUT P01".CAM_DISC.CAM.Support.Cam_Shift_Distance := 990.0; "DI OUT P01".CAM_DISC.CAM.Support.Output_StartPosition := 2073.46; "DI OUT P01".CAM_DISC.CAM.Support.Output_Distance := 38.0; // Copy Cam "DI OUT P01".COPY_CAM.CAM.MC_CopyCamData.Mode := 1; "DI OUT P01".COPY_CAM.CAM.MC_CopyCamData.NumberOfPoints := 26; |
|
|
|
|
|
Network 5: HMI SetValues - Velocity default values // SCARA VelocityFactor MoveDirect - MoveDirectAbsolut/Relative "HMI KEY".SetValues.SCARA_3D_VelocityFactor_Slow := 0.05; "HMI KEY".SetValues.SCARA_3D_VelocityFactor_Middle := 0.09; "HMI KEY".SetValues.SCARA_3D_VelocityFactor_Fast := 0.36; // Rotary Axis 4.39°/s, 21.97°/s, 48.34°/s, 87.89°/s "HMI KEY".SetValues.Rotary_Axis_Slow := 4.39; "HMI KEY".SetValues.Rotary_Axis_Middle := 21.97; "HMI KEY".SetValues.Rotary_Axis_Fast := 48.34; // Linear Axis "HMI KEY".SetValues.Linear_Axis_Slow := 20.00; "HMI KEY".SetValues.Linear_Axis_Middle := 80.00; "HMI KEY".SetValues.Linear_Axis_Fast := 400.00; |
|
|
|
|
|
Network 6: SCARA_3D Selective Compliance Assembly Robot Arm Pre-Setting - default "DI OUT P01".SCARA_3D.KIN.MC_MoveDirectAbsolute.CoordSystem := 0; // WCS "DI OUT P01".SCARA_3D.KIN.MC_MoveDirectAbsolute.VelocityFactor := "HMI KEY".SetValues.SCARA_3D_VelocityFactor_Fast; "DI OUT P01".SCARA_3D.KIN.MC_MoveDirectAbsolute.DirectionA := 3; //shortest distance "DI OUT P01".SCARA_3D.KIN.MC_MoveDirectAbsolute.BufferMode := 2; // smooth "DI OUT P01".SCARA_3D.KIN.MC_MoveDirectAbsolute.PositionMode := 2; //Orientation A4 move relative when modulo on "DI OUT P01".SCARA_3D.KIN.MC_MoveDirectAbsolute.CoordSystem := 100; // MCS "DI OUT P01".SCARA_3D.KIN.MC_MoveDirectAbsolute.Position[3] := 940.84; // Virtual z-axis
"DI OUT P01".SCARA_3D.KIN.MC_MoveDirectRelative.CoordSystem := 0; // WCS "DI OUT P01".SCARA_3D.KIN.MC_MoveDirectRelative.VelocityFactor := "HMI KEY".SetValues.SCARA_3D_VelocityFactor_Fast; "DI OUT P01".SCARA_3D.KIN.MC_MoveDirectRelative.BufferMode := 2; "DI OUT P01".SCARA_3D.KIN.MC_MoveDirectRelative.CoordSystem := 100; // MCS "DI OUT P01".SCARA_3D.KIN.MC_MoveDirectRelative.Distance[3] := 0.0; // Virtual z-axis |
|
|
|
|
|
Network 7: HMI MoveDirectPos in MCS / WCS // MoveDirectRelative P0 MCS "HMI KEY".MoveDirectPos[0].WCS[1] := 90.0; "HMI KEY".MoveDirectPos[0].WCS[2] := 90.0; "HMI KEY".MoveDirectPos[0].WCS[3] := 940.84; "HMI KEY".MoveDirectPos[0].WCS[4] := -180.0; // MoveDirectAbsolute P1 WCS "HMI KEY".MoveDirectPos[1].WCS[1] := 745.45; "HMI KEY".MoveDirectPos[1].WCS[2] := 686.46; "HMI KEY".MoveDirectPos[1].WCS[3] := 940.84; "HMI KEY".MoveDirectPos[1].WCS[4] := 0.0; // MoveDirectAbsolute P2 WCS "HMI KEY".MoveDirectPos[2].WCS[1] := 745.45; "HMI KEY".MoveDirectPos[2].WCS[2] := 1108.76; "HMI KEY".MoveDirectPos[2].WCS[3] := 940.84; "HMI KEY".MoveDirectPos[2].WCS[4] := 0.0; // MoveDirectAbsolute P3 WCS "HMI KEY".MoveDirectPos[3].WCS[1] := 2556.0; "HMI KEY".MoveDirectPos[3].WCS[2] := 2015.0; "HMI KEY".MoveDirectPos[3].WCS[3] := 940.84; "HMI KEY".MoveDirectPos[3].WCS[4] := 0.0; // MoveDirectAbsolute P4 WCS "HMI KEY".MoveDirectPos[4].WCS[1] := 3700.0; "HMI KEY".MoveDirectPos[4].WCS[2] := 1860.0; "HMI KEY".MoveDirectPos[4].WCS[3] := 940.84; "HMI KEY".MoveDirectPos[4].WCS[4] := 0.0; // MoveDirectAbsolute P5 WCS "HMI KEY".MoveDirectPos[5].WCS[1] := 4895.0; "HMI KEY".MoveDirectPos[5].WCS[2] := 2063.0; "HMI KEY".MoveDirectPos[5].WCS[3] := 940.84; "HMI KEY".MoveDirectPos[5].WCS[4] := 0.0; // MoveDirectAbsolute P6 WCS "HMI KEY".MoveDirectPos[6].WCS[1] := 5229.93; "HMI KEY".MoveDirectPos[6].WCS[2] := 1061.22; "HMI KEY".MoveDirectPos[6].WCS[3] := 940.84; "HMI KEY".MoveDirectPos[6].WCS[4] := 0.0; // MoveDirectAbsolute P7 --- not used "HMI KEY".MoveDirectPos[7].WCS[1] := 2372.79; "HMI KEY".MoveDirectPos[7].WCS[2] := 2410.85; "HMI KEY".MoveDirectPos[7].WCS[3] := 940.84; "HMI KEY".MoveDirectPos[7].WCS[4] := 0.0; // MoveDirectAbsolute P8 --- not used "HMI KEY".MoveDirectPos[8].WCS[1] := 60.21; "HMI KEY".MoveDirectPos[8].WCS[2] := 58.40; "HMI KEY".MoveDirectPos[8].WCS[3] := 940.84; "HMI KEY".MoveDirectPos[8].WCS[4] := -118.59; |
|
|
|
|
|
Network 8: Dimentions Length, Width, Heigh [mm] // Sprayer carrier framework "HMI KEY".Sprayer_Framework.Length := 1844.89; "HMI KEY".Sprayer_Framework.Width := 538.78; "HMI KEY".Sprayer_Framework.Height := 1474.82; // Convex master mold "HMI KEY".Convex_Master_Mold.Length := 816.32; "HMI KEY".Convex_Master_Mold.Width := 489.79; "HMI KEY".Convex_Master_Mold.Height := 304.76; // Mold carrier "HMI KEY".Mold_Carrier.Length := 4653.06; "HMI KEY".Mold_Carrier.Width := 565.98; "HMI KEY".Mold_Carrier.Height := 261.22; // Plastic sheet "HMI KEY".Plastic_Sheet.Length := 1121.08; "HMI KEY".Plastic_Sheet.Width := 489.78; "HMI KEY".Plastic_Sheet.Height := 21.76; // Vacuum gripper "HMI KEY".Vacuum_Gripper.Length := 707.48; "HMI KEY".Vacuum_Gripper.Width := 489.79; "HMI KEY".Vacuum_Gripper.Height := 157.82; // Heating jacket "HMI KEY".Heating_Jacket.Length := 854.42; "HMI KEY".Heating_Jacket.Width := 522.44; "HMI KEY".Heating_Jacket.Height := 92.51; // Articulated arm framework "HMI KEY".Articulated_Arm_Framework.Length := 2802.70; "HMI KEY".Articulated_Arm_Framework.Width := 1061.22; "HMI KEY".Articulated_Arm_Framework.Height := 2612.23; // Traversing range "HMI KEY".Traversing_Range.Length := 3472.34; "HMI KEY".Traversing_Range.Width := 1104.76; "HMI KEY".Traversing_Range.Height := 2367.34; |
|