

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
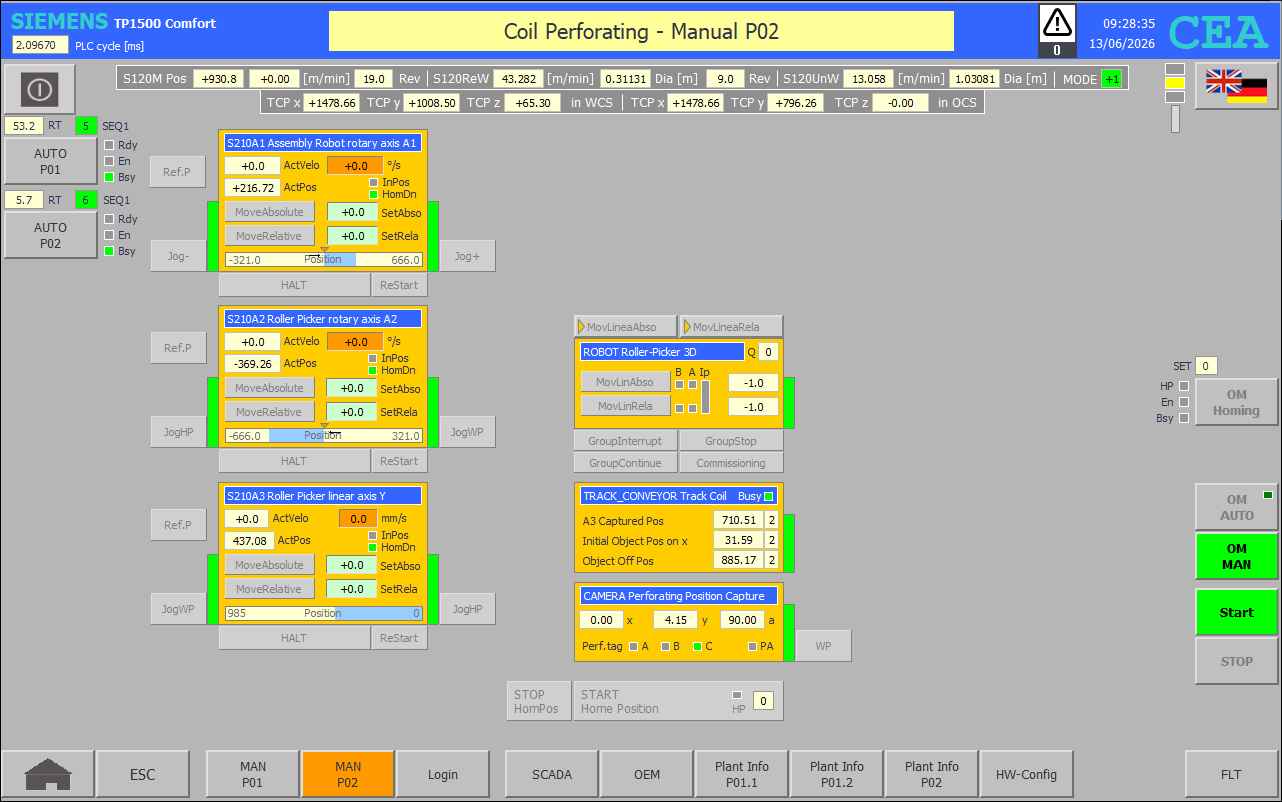
FB48 MAN P02 : Manual Operation Mode |
|
|
|
|
|
Network 1: S210A1 Roller Picker A1 axis - enable "DI OUT P02".Manual.S210A1.Positive_Scaled_Value; IF #PLANT_MANUAL AND NOT #SUPPORT_SEQ THEN IF "DI MAIN GLB".M00.EntirePlant_Run_Impulse THEN #S210A1.ManualVelocity_1 := "DI OUT P02".S210A1.DRV.Support.SetVelocity; END_IF; "DI OUT P02".S210A1.DRV.Support.SetVelocity := #S210A1.ManualVelocity_1; #S210A1.Execute_slow_fast_HP := "HMI KEY".P02.S210A1.F4_Jog_slow_HP AND "HMI KEY".P02.S210A1.F11_Enable_HP AND NOT "HMI KEY".P02.S210A1.F21_HALT; #S210A1.Execute_slow_fast_WP := "HMI KEY".P02.S210A1.F3_Jog_slow_WP AND "HMI KEY".P02.S210A1.F12_Enable_WP AND NOT "HMI KEY".P02.S210A1.F21_HALT; END_IF; // Enable disable HP/WP "HMI KEY".P02.S210A1.F11_Enable_HP := "DI OUT P02".S210A1.DRV.Support.InOperation AND NOT "DI OUT P02".S210A1.Common_FLT AND "DI OUT P02".S210A1.DRV.Support.ActualPosition >= #S210A1.Negative_Scaled_Value; "HMI KEY".P02.S210A1.F12_Enable_WP := "DI OUT P02".S210A1.DRV.Support.InOperation AND NOT "DI OUT P02".S210A1.Common_FLT AND "DI OUT P02".S210A1.DRV.Support.ActualPosition <= #S210A1.Positive_Scaled_Value; |
|
|
|
|
|
Network 2: S210A2 Roller Picker A2 axis - enable IF #PLANT_MANUAL AND NOT #SUPPORT_SEQ THEN IF "DI MAIN GLB".M00.EntirePlant_Run_Impulse THEN #S210A2.ManualVelocity_1 := "DI OUT P02".S210A2.DRV.Support.SetVelocity; END_IF; "DI OUT P02".S210A2.DRV.Support.SetVelocity := #S210A2.ManualVelocity_1; #S210A2.Execute_slow_fast_HP := "HMI KEY".P02.S210A2.F4_Jog_slow_HP AND "HMI KEY".P02.S210A2.F11_Enable_HP AND NOT "HMI KEY".P02.S210A2.F21_HALT; #S210A2.Execute_slow_fast_WP := "HMI KEY".P02.S210A2.F3_Jog_slow_WP AND "HMI KEY".P02.S210A2.F12_Enable_WP AND NOT "HMI KEY".P02.S210A2.F21_HALT; END_IF; // Enable disable HP/WP "HMI KEY".P02.S210A2.F11_Enable_HP := "DI OUT P02".S210A2.DRV.Support.InOperation AND NOT "DI OUT P02".S210A2.Common_FLT AND "DI OUT P02".S210A2.DRV.Support.ActualPosition >= #S210A2.Negative_Scaled_Value; "HMI KEY".P02.S210A2.F12_Enable_WP := "DI OUT P02".S210A2.DRV.Support.InOperation AND NOT "DI OUT P02".S210A2.Common_FLT AND "DI OUT P02".S210A2.DRV.Support.ActualPosition <= #S210A2.Positive_Scaled_Value; |
|
|
|
|
|
Network 3: S210A3 Roller Picker X axis - enable IF #PLANT_MANUAL AND NOT #SUPPORT_SEQ THEN IF "DI MAIN GLB".M00.EntirePlant_Run_Impulse THEN #S210A3.ManualVelocity_1 := "DI OUT P02".S210A3.DRV.Support.SetVelocity; END_IF; "DI OUT P02".S210A3.DRV.Support.SetVelocity := #S210A3.ManualVelocity_1; #S210A3.Execute_slow_fast_HP := "HMI KEY".P02.S210A3.F4_Jog_slow_HP AND "HMI KEY".P02.S210A3.F11_Enable_HP AND NOT "HMI KEY".P02.S210A3.F21_HALT; #S210A3.Execute_slow_fast_WP := "HMI KEY".P02.S210A3.F3_Jog_slow_WP AND "HMI KEY".P02.S210A3.F12_Enable_WP AND NOT "HMI KEY".P02.S210A3.F21_HALT; END_IF; // Enable disable HP/WP "HMI KEY".P02.S210A3.F11_Enable_HP := "DI OUT P02".S210A3.DRV.Support.InOperation AND NOT "DI OUT P02".S210A3.Common_FLT AND "DI OUT P02".S210A3.DRV.Support.ActualPosition >= "DI OUT P02".S210A3.DRV.Support.EndLim_MinPos; "HMI KEY".P02.S210A3.F12_Enable_WP := "DI OUT P02".S210A3.DRV.Support.InOperation AND NOT "DI OUT P02".S210A3.Common_FLT AND "DI OUT P02".S210A3.DRV.Support.ActualPosition <= "DI OUT P02".S210A3.DRV.Support.EndLim_MaxPos; |
|
|
|
|
|
Network 4: ROBOT_3D Cartesian Roller-Picker-2D (RP2D) - enable "HMI KEY".P02.ROBOT_3D.F8_Enabled := "DI OUT P02".ROBOT_3D.DRV.Support.InOperation AND "DI OUT P02".ROBOT_3D.DRV.Support.KINEMATICS_Enabled AND NOT ("DI OUT P02".ROBOT_3D.Common_FLT OR "HMI KEY".P02.ROBOT_3D.F5_GroupStop) AND "E00 ROBOT_3D MinLimit_x" AND "E00 ROBOT_3D MaxLimit_x" AND "E00 ROBOT_3D MinLimit_y" AND "E00 ROBOT_3D MaxLimit_y" AND "E00 ROBOT_3D MinLimit_z" AND "E00 ROBOT_3D MaxLimit_z"; // Cancel GroupInterrupt and GroupContinue IF NOT ("DI OUT P02".ROBOT_3D.DRV.Support.X17_GroupInterrupt AND "HMI KEY".P02.ROBOT_3D.F8_Enabled) THEN #ROBOT_3D.GroupContinue := #ROBOT_3D.GroupInterrupt := FALSE; END_IF; // Execute MoveLinearAbsolute IF "DI OUT P02".ROBOT_3D.DRV.MC_MoveLinearAbsolute.Done OR NOT "HMI KEY".P02.ROBOT_3D.F8_Enabled THEN #ROBOT_3D.MoveLinearAbsolute := FALSE; END_IF; // Stop execute MoveLinearRelative IF "DI OUT P02".ROBOT_3D.DRV.MC_MoveLinearRelative.Done OR NOT "HMI KEY".P02.ROBOT_3D.F8_Enabled THEN #ROBOT_3D.MoveLinearRelative := FALSE; END_IF; |
|
|
|
|
|
Network 5: CAMERA Perforating Position Capture - enable "HMI KEY".P02.CAMERA.F12_Enable_WP := "HMI KEY".P01.S120M.F12_Enable_WP AND NOT "DI OUT P02".TRACK_CONVEYOR.Common_FLT; |
|
|
|
|
|
Network 6: Monitoring manual operation *** IF NOT #PLANT_MANUAL THEN RETURN; ELSIF #MODULE_HP AND NOT #Support.Homing_Sequence_REg THEN "DI MAIN P02".M00.Initialization := TRUE; END_IF; #Support.Homing_Sequence_REg := #MODULE_HP; "DI MAIN P02".M00.TOF_EntireModule_STOP_Pulse(IN := NOT #SUPPORT_SEQ AND #Support.Homing_Sequence_FEg, PT := t#500ms); #Support.Homing_Sequence_FEg := #SUPPORT_SEQ; IF #SUPPORT_SEQ THEN RETURN; END_IF; |
|
|
|
|
|
Network 7: ROBOT_3D Cartesian Roller-Picker-3D - execute IF "HMI KEY".P02.ROBOT_3D.F7_GroupContinue AND "DI OUT P02".ROBOT_3D.DRV.Support.X17_GroupInterrupt THEN #ROBOT_3D.GroupContinue := "HMI KEY".P02.#ROBOT_3D.F8_Enabled; ELSIF "HMI KEY".P02.#ROBOT_3D.F6_GroupInterrupt THEN #ROBOT_3D.GroupInterrupt := "HMI KEY".P02.#ROBOT_3D.F8_Enabled; ELSIF "HMI KEY".P02.#ROBOT_3D.F1_MoveLinearAbsolute THEN #ROBOT_3D.MoveLinearAbsolute := "HMI KEY".P02.#ROBOT_3D.F8_Enabled; ELSIF "HMI KEY".P02.#ROBOT_3D.F2_MoveLinearRelative THEN #ROBOT_3D.MoveLinearRelative := "HMI KEY".P02.#ROBOT_3D.F8_Enabled; END_IF; |
|
|
|
|
|
Network 8: CAMERA Perforating Position Capture - execute "HMI KEY".P02.CAMERA.F10_Execute := "HMI KEY".P02.CAMERA.F12_Enable_WP AND "HMI KEY".P02.CAMERA.F2_WP AND "E00 CAMERA Perforating Pointer"; IF "HMI KEY".P02.CAMERA.F10_Execute THEN "DI OUT P02".CAMERA.Recording.Done := FALSE; END_IF; |
|