


|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
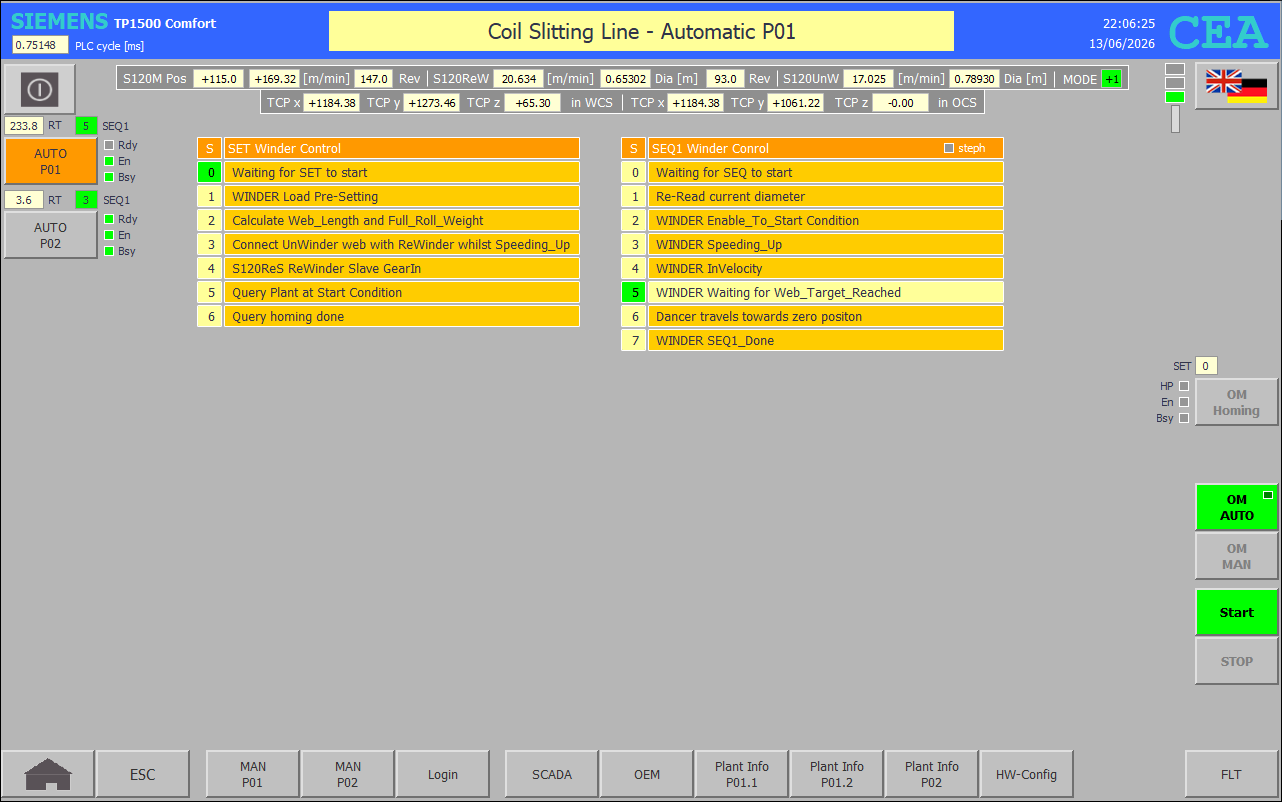
FB32 SEQ1 P01: Winder Control Step Switching Mechanism |
|
|
|
|
|
Network 1: Pre-Setting "DI MAIN P01".M00.ReadyToStart := "DI MAIN GLB".M00.HomePosition_All AND NOT "DI MAIN P01".M00.HomePositionRunning; |
|
|
|
|
|
Network 2: Define last step #SSM(LAST_STEP := 7); |
|
|
|
|
|
Network 3: Step Switching Mechanism (SSM) CASE #SSM.S.stepact OF 0: // Waiting for SEQ to start "DI MAIN P01".to_P02.ReadyToEnd := "DI MAIN P01".M00.SEQ1_Busy := FALSE; "DI MAIN P01".to_P02.Request := "DI MAIN P01".M00.ReadyToStart AND "DI MAIN GLB".M00.AutomaticEntirePlant_run; IF "DI MAIN P01".M00.ReadyToStart AND "HMI KEY".P01.WINDER.F3_Jog_slow_WP THEN #SSM.S.stepd := #SSM.S.steps AND "DI MAIN GLB".M00.ManualEntirePlant_run AND "DI OUT P01".Manual.WINDER.Execute_SSM_Mode; ELSIF NOT "DI MAIN P01".M00.ReadyToStart AND "DI MAIN GLB".M00.OM_AUTO_ON AND "HMI KEY".P00.GLB.F5_Start THEN "DI OUT P01".Manual.WINDER.Execute_SSM_Mode := "DI MAIN GLB".M00.AutomaticEntirePlant_run := FALSE; #SSM.S."1_FAULT_00_15".%X0 := TRUE; ELSE #SSM.S.stepd := #SSM.S.steps AND "DI MAIN P01".M00.ReadyToStart AND "DI MAIN GLB".M00.AutomaticEntirePlant_run AND "DI MAIN P02".to_P01.Request; END_IF;
1: // Re-Read current diameter IF #SSM.S.steplo THEN #RunTimeCounter := 0; "HMI KEY".P01.WINDER.F23_ParameterSet_1 := TRUE; ELSE "HMI KEY".P01.WINDER.F23_ParameterSet_1 := FALSE; #SSM.S.stepd := "DI OUT P01".WINDER.ReWinder.Roll_Diameter >= "DI OUT P01".WINDER.ReWinder.Core_Diameter AND "DI OUT P01".WINDER.UnWinder.Roll_Diameter >= "DI OUT P01".WINDER.UnWinder.Core_Diameter AND "DI OUT P01".WINDER.Web.Rest_Length > 0.0; END_IF;
2: // WINDER Enable_To_Start Condition IF #SSM.S.steplo THEN "DI OUT P01".DANCER_PID.Mode := 3; #SSM.S.c1.set := 10; #SSM.S.c1.start := TRUE; "DI OUT P01".DANCER_PID.ModeActivate := "HMI KEY".P01.WINDER.F12_Enable_WP; "DI MAIN P01".M00.SEQ1_Busy := TRUE; ELSE "DI OUT P01".DANCER_PID.ModeActivate := NOT #SSM.S.c1.done AND #SSM.S.stepa; "DI OUT P01".WINDER.Enable_To_Start := "HMI KEY".P01.S120M.F12_Enable_WP AND #SSM.S.stepa; #SSM.S.stepd := "DI OUT P01".WINDER.Enabled AND "DI OUT P01".DANCER_PID.State = 3 AND #SSM.S.c1.done; END_IF;
3: // WINDER Speeding_Up "DI OUT P01".S120M.DRV.Support.SetVelocity := "DI OUT P01".WINDER.Web.Master_Speeding_Up_Velocity; "DI OUT P01".S120ReW.DRV.Support.SetVelocity := "DI OUT P01".WINDER.Interface.ReWinder.WRITE.Velocity; "DI OUT P01".S120UnW.DRV.Support.SetVelocity := "DI OUT P01".WINDER.Interface.UnWinder.WRITE.Velocity; "DI OUT P01".WINDER.Enable_To_Start := "DI OUT P01".S120M.DRV.Support.MoveJogWP := "HMI KEY".P01.S120M.F12_Enable_WP AND #SSM.S.stepa; "DI OUT P01".S120ReW.DRV.Support.MoveJogWP := "HMI KEY".P01.S120ReW.F12_Enable_WP AND "DI OUT P01".S120M.DRV.Support.LampON AND #SSM.S.stepa; "DI OUT P01".S120UnW.DRV.Support.MoveJogWP := "HMI KEY".P01.S120UnW.F12_Enable_WP AND "DI OUT P01".S120M.DRV.Support.LampON AND #SSM.S.stepa; "DI OUT P01".WINDER.Speeding_Up := #SSM.S.stepa; IF "DI OUT P01".DANCER_PEW.Support.PEW_Scaled >= "DI OUT P01".WINDER.ReWinder.Dancer_Position_SetPoint THEN "DI MAIN P01".M00.SEQ1_DoWP1 := "DI OUT P01".WINDER.Speeding_Up_Done := TRUE; "DI OUT P01".WINDER.Speeding_Up := FALSE; #SSM.S.stepd := "E00 WebAvailable"; END_IF;
4: // WINDER InVelocity "DI MAIN P01".to_P02.EnabledToRun := TRUE; "DI OUT P01".S120M.DRV.Support.SetVelocity := "DI OUT P01".WINDER.Web.Master_Work_Velocity; "DI OUT P01".S120ReW.DRV.Support.SetVelocity := "DI OUT P01".WINDER.Interface.ReWinder.WRITE.Velocity; "DI OUT P01".S120UnW.DRV.Support.SetVelocity := "DI OUT P01".WINDER.Interface.UnWinder.WRITE.Velocity; "DI OUT P01".WINDER.Enable_To_Start := "DI OUT P01".S120M.DRV.Support.MoveJogWP := "HMI KEY".P01.S120M.F12_Enable_WP AND #SSM.S.stepa; "DI OUT P01".S120ReW.DRV.MC_TorqueAdditive.Enable := "DI OUT P01".S120ReW.DRV.Support.MoveJogWP := "HMI KEY".P01.S120ReW.F12_Enable_WP AND "DI OUT P01".S120M.DRV.Support.LampON AND #SSM.S.stepa; "DI OUT P01".S120UnW.DRV.MC_TorqueAdditive.Enable := "DI OUT P01".S120UnW.DRV.Support.MoveJogWP := "HMI KEY".P01.S120UnW.F12_Enable_WP AND "DI OUT P01".S120M.DRV.Support.LampON AND #SSM.S.stepa; #SSM.S.stepd := "DI OUT P01".S120M.DRV.MC_MoveJog.InVelocity AND "DI OUT P01".S120ReW.DRV.MC_MoveJog.InVelocity AND "DI OUT P01".S120UnW.DRV.MC_MoveJog.InVelocity;
5: // WINDER Waiting for Web_Target_Reached "DI OUT P01".S120M.DRV.Support.SetVelocity := "DI OUT P01".WINDER.Web.Master_Work_Velocity; "DI OUT P01".S120ReW.DRV.Support.SetVelocity := "DI OUT P01".WINDER.Interface.ReWinder.WRITE.Velocity; "DI OUT P01".S120UnW.DRV.Support.SetVelocity := "DI OUT P01".WINDER.Interface.UnWinder.WRITE.Velocity; "DI OUT P01".WINDER.Enable_To_Start := "DI OUT P01".S120M.DRV.Support.MoveJogWP := "HMI KEY".P01.S120M.F12_Enable_WP AND #SSM.S.stepa; "DI OUT P01".S120ReW.DRV.MC_TorqueAdditive.Enable := "DI OUT P01".S120ReW.DRV.Support.MoveJogWP := "HMI KEY".P01.S120ReW.F12_Enable_WP AND "DI OUT P01".S120M.DRV.Support.LampON AND #SSM.S.stepa; "DI OUT P01".S120UnW.DRV.MC_TorqueAdditive.Enable := "DI OUT P01".S120UnW.DRV.Support.MoveJogWP := "HMI KEY".P01.S120UnW.F12_Enable_WP AND "DI OUT P01".S120M.DRV.Support.LampON AND #SSM.S.stepa; #SSM.S.stepd := "DI OUT P01".WINDER.Web_Target_Reached AND "DI OUT P01".WINDER.Diameter_Target_Reached;
6: // Dancer travels towards zero positon IF #SSM.S.stepfc THEN "DI MAIN P01".to_P02.ReadyToEnd := TRUE; "DI MAIN P01".to_P02.EnabledToRun := "DI OUT P01".S120ReW.DRV.MC_TorqueAdditive.Enable := "DI OUT P01".S120UnW.DRV.MC_TorqueAdditive.Enable := "DI OUT P01".WINDER.Speeding_Up_Done := "DI OUT P01".WINDER.Enable_To_Start := "DI OUT P01".S120M.DRV.Support.MoveJogWP := "DI OUT P01".S120ReW.DRV.Support.MoveJogWP := "DI OUT P01".S120UnW.DRV.Support.MoveJogWP := FALSE; ELSIF "DI OUT P01".DANCER_PEW.Support.PEW_Scaled <= "DI OUT P01".WINDER.ReWinder.Dancer_Position_Min + 4.0 THEN #SSM.S.stepd := NOT "E00 WebAvailable"; END_IF;
7: // WINDER SEQ1_Done IF #SSM.S.stepfc THEN "HMI KEY".Plantinfo_P01.Coil_Slitting_Done := "DI MAIN P01".M00.SEQ1_WP1_Done_OK := TRUE; "DI MAIN P01".M00.ProductCounter.GoodParts := "DI MAIN P01".M00.ProductCounter.GoodParts + 1; "DI OUT P01".Manual.WINDER.Execute_SSM_Mode := "DI MAIN P01".to_P02.Request := FALSE; ELSE "DI OUT P01".DANCER_PID.Setpoint := 0.0; "DI MAIN P01".M00.SEQ1_Done := "DI MAIN P01".to_P02.Done := NOT #SSM.S.steplo AND "DI MAIN P02".to_P01.Done; END_IF; END_CASE; |
|