


|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
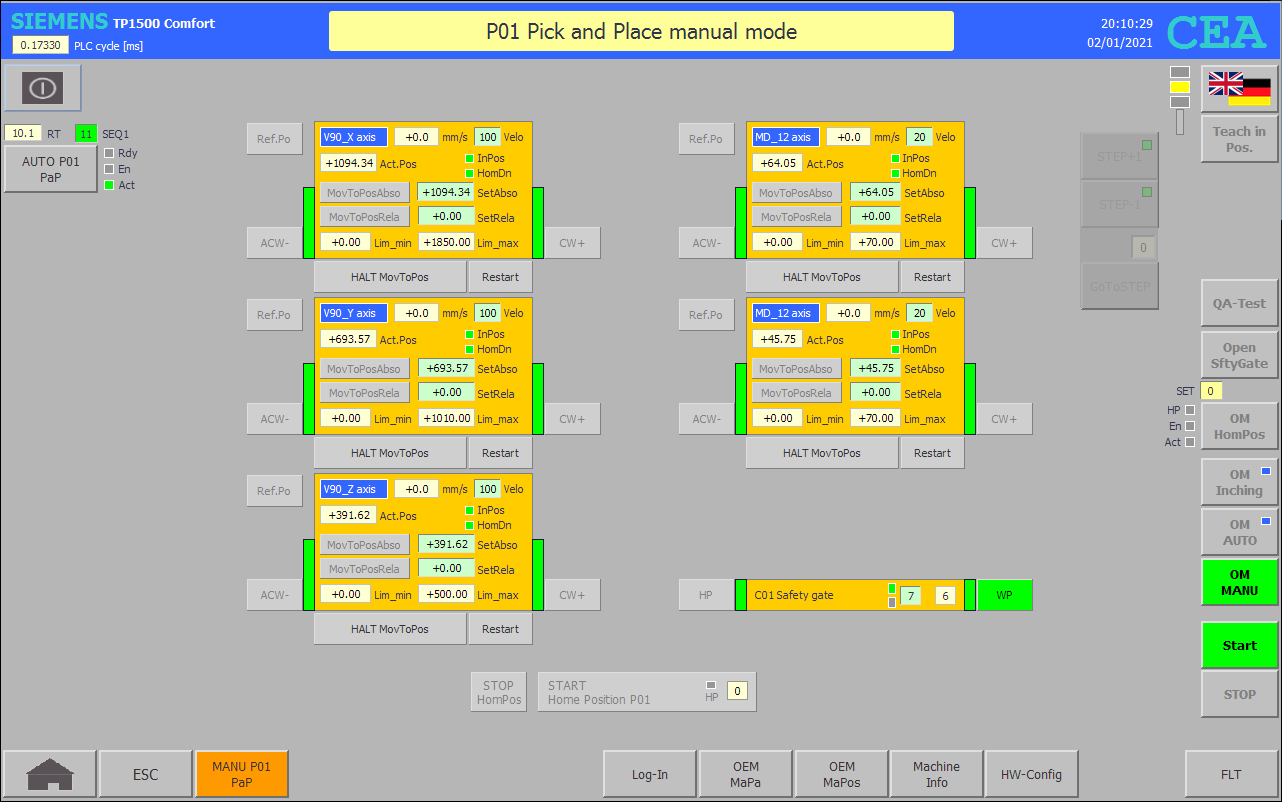
To go to next HMI image use the touch buttons; some of them are interactive. |
|
FB38 MAN P01 : P01 manual mode |
|
|
|
|
|
Netzwerk 1: MD12 Gripper fingers 1+2 axis - enable IF #ST_MANU AND NOT #SUPPORT_SEQ THEN IF "M00 CmpltMaRun Imp" THEN #MD12.ManuVelocity_1 := "DI OUT P01".MD_12.DRV.Support.SetVelo / 5.0; END_IF; // Set value velocity "DI OUT P01".MD_12.DRV.Support.SetVelo := #MD12.ManuVelocity_1 * 5.0; // Jog slow WP (button function) #MD12.CmdExe_slow_WP := "HMI KEY".P01.MD_12.F3_Jog_slow_WP; // Jog slow HP (button function) #MD12.CmdExe_slow_HP := "HMI KEY".P01.MD_12.F4_Jog_slow_HP; END_IF; // Enabling HP "HMI KEY".P01.MD_12.F11_Enable_HP := "DI OUT P01".MD_12.DRV.Support.InOperation // ready AND "E00 MD_12 LimMin" AND "DI OUT P01".MD_12.DRV.Support.ActPos >= "DI OUT P01".MD_12.DRV.Support.SW_EndLim_MinPos //(not by modulo on) AND NOT ("DI OUT P01".MD_12.DRV.Support.SW_EndLim_Min OR "DI OUT P01".MD_12.Com_FLT); // Enabling WP "HMI KEY".P01.MD_12.F12_Enable_WP := "DI OUT P01".MD_12.DRV.Support.InOperation // ready AND "E00 MD_12 LimMax" AND "DI OUT P01".MD_12.DRV.Support.ActPos <= "DI OUT P01".MD_12.DRV.Support.SW_EndLim_MaxPos // (not by modulo on) AND NOT ("DI OUT P01".MD_12.DRV.Support.SW_EndLim_Max OR "DI OUT P01".MD_12.Com_FLT); |
|
|
|
|
|
Netzwerk 2: MD34 Gripper fingers 3+4 axis - enable IF #ST_MANU AND NOT #SUPPORT_SEQ THEN IF "M00 CmpltMaRun Imp" THEN #MD34.ManuVelocity_1 := "DI OUT P01".MD_34.DRV.Support.SetVelo / 5.0; END_IF; // Set value velocity "DI OUT P01".MD_34.DRV.Support.SetVelo := #MD34.ManuVelocity_1 * 5.0; // Jog slow WP (button function) #MD34.CmdExe_slow_WP := "HMI KEY".P01.MD_34.F3_Jog_slow_WP; // Jog slow HP (button function) #MD34.CmdExe_slow_HP := "HMI KEY".P01.MD_34.F4_Jog_slow_HP; END_IF; // Enabling HP "HMI KEY".P01.MD_34.F11_Enable_HP := "DI OUT P01".MD_34.DRV.Support.InOperation // ready AND "E00 MD_34 LimMin" AND "DI OUT P01".MD_34.DRV.Support.ActPos >= "DI OUT P01".MD_34.DRV.Support.SW_EndLim_MinPos //(not by modulo on) AND NOT ("DI OUT P01".MD_34.DRV.Support.SW_EndLim_Min OR "DI OUT P01".MD_34.Com_FLT); // Enabling WP "HMI KEY".P01.MD_34.F12_Enable_WP := "DI OUT P01".MD_34.DRV.Support.InOperation // ready AND "E00 MD_34 LimMax" AND "DI OUT P01".MD_34.DRV.Support.ActPos <= "DI OUT P01".MD_34.DRV.Support.SW_EndLim_MaxPos // (not by modulo on) AND NOT ("DI OUT P01".MD_34.DRV.Support.SW_EndLim_Max OR "DI OUT P01".MD_34.Com_FLT); |
|
|
|
|
|
Netzwerk 3: V90_X Gripper linear Xaxis - enable IF #ST_MANU AND NOT #SUPPORT_SEQ THEN IF "M00 CmpltMaRun Imp" THEN #V90_X.ManuVelocity_1 := "DI OUT P01".V90_X.DRV.Support.SetVelo / 5.0; END_IF; // Set value velocity "DI OUT P01".V90_X.DRV.Support.SetVelo := #V90_X.ManuVelocity_1 * 5.0; // Jog slow WP (button function) #V90_X.CmdExe_slow_WP := "HMI KEY".P01.V90_X.F3_Jog_slow_WP; // Jog slow HP (button function) #V90_X.CmdExe_slow_HP := "HMI KEY".P01.V90_X.F4_Jog_slow_HP; END_IF; // Enabling HP "HMI KEY".P01.V90_X.F11_Enable_HP := "DI OUT P01".V90_X.DRV.Support.InOperation // ready AND "E00 V90_X LimMin" AND "DI OUT P01".V90_X.DRV.Support.ActPos >= "DI OUT P01".V90_X.DRV.Support.SW_EndLim_MinPos //(not by modulo on) AND NOT ("DI OUT P01".V90_X.DRV.Support.SW_EndLim_Min OR "DI OUT P01".V90_X.Com_FLT); // Enabling WP "HMI KEY".P01.V90_X.F12_Enable_WP := "DI OUT P01".V90_X.DRV.Support.InOperation // ready AND "E00 V90_X LimMax" AND "DI OUT P01".V90_X.DRV.Support.ActPos <= "DI OUT P01".V90_X.DRV.Support.SW_EndLim_MaxPos // (not by modulo on) AND NOT ("DI OUT P01".V90_X.DRV.Support.SW_EndLim_Max OR "DI OUT P01".V90_X.Com_FLT); |
|
|
|
|
|
Netzwerk 4: V90_Y Gripper linear Xaxis - enable IF #ST_MANU AND NOT #SUPPORT_SEQ THEN IF "M00 CmpltMaRun Imp" THEN #V90_Y.ManuVelocity_1 := "DI OUT P01".V90_Y.DRV.Support.SetVelo / 5.0; END_IF; // Set value velocity "DI OUT P01".V90_Y.DRV.Support.SetVelo := #V90_Y.ManuVelocity_1 * 5.0; // Jog slow WP (button function) #V90_Y.CmdExe_slow_WP := "HMI KEY".P01.V90_Y.F3_Jog_slow_WP; // Jog slow HP (button function) #V90_Y.CmdExe_slow_HP := "HMI KEY".P01.V90_Y.F4_Jog_slow_HP; END_IF; // Enabling HP "HMI KEY".P01.V90_Y.F11_Enable_HP := "DI OUT P01".V90_Y.DRV.Support.InOperation // ready AND "E00 V90_Y LimMin" AND "DI OUT P01".V90_Y.DRV.Support.ActPos >= "DI OUT P01".V90_Y.DRV.Support.SW_EndLim_MinPos //(not by modulo on) AND NOT ("DI OUT P01".V90_Y.DRV.Support.SW_EndLim_Min OR "DI OUT P01".V90_Y.Com_FLT); // Enabling WP "HMI KEY".P01.V90_Y.F12_Enable_WP := "DI OUT P01".V90_Y.DRV.Support.InOperation // ready AND "E00 V90_Y LimMax" AND "DI OUT P01".V90_Y.DRV.Support.ActPos <= "DI OUT P01".V90_Y.DRV.Support.SW_EndLim_MaxPos // (not by modulo on) AND NOT ("DI OUT P01".V90_Y.DRV.Support.SW_EndLim_Max OR "DI OUT P01".V90_Y.Com_FLT); |
|
|
|
|
|
Netzwerk 5: V90_Z Gripper linear Xaxis - enable IF #ST_MANU AND NOT #SUPPORT_SEQ THEN IF "M00 CmpltMaRun Imp" THEN #V90_Z.ManuVelocity_1 := "DI OUT P01".V90_Z.DRV.Support.SetVelo / 5.0; END_IF; // Set value velocity "DI OUT P01".V90_Z.DRV.Support.SetVelo := #V90_Z.ManuVelocity_1 * 5.0; // Jog slow WP (button function) #V90_Z.CmdExe_slow_WP := "HMI KEY".P01.V90_Z.F3_Jog_slow_WP; // Jog slow HP (button function) #V90_Z.CmdExe_slow_HP := "HMI KEY".P01.V90_Z.F4_Jog_slow_HP; END_IF; // Enabling HP "HMI KEY".P01.V90_Z.F11_Enable_HP := "DI OUT P01".V90_Z.DRV.Support.InOperation // ready AND "E00 V90_Z LimMin" AND "DI OUT P01".V90_Z.DRV.Support.ActPos >= "DI OUT P01".V90_Z.DRV.Support.SW_EndLim_MinPos //(not by modulo on) AND NOT ("DI OUT P01".V90_Z.DRV.Support.SW_EndLim_Min OR "DI OUT P01".V90_Z.Com_FLT); // Enabling WP "HMI KEY".P01.V90_Z.F12_Enable_WP := "DI OUT P01".V90_Z.DRV.Support.InOperation // ready AND "E00 V90_Z LimMax" AND "DI OUT P01".V90_Z.DRV.Support.ActPos <= "DI OUT P01".V90_Z.DRV.Support.SW_EndLim_MaxPos // (not by modulo on) AND NOT ("DI OUT P01".V90_Z.DRV.Support.SW_EndLim_Max OR "DI OUT P01".V90_Z.Com_FLT); |
|
|
|
|
|
Netzwerk 6: C01 Lifting gate - enable "HMI KEY".P01.C01.F11_Enable_HP := "HMI KEY".P01.C01.F12_Enable_WP := "DI OUT P01".C01.VLV_O.SetIdleTime > 0 AND NOT "DI OUT P01".C01.com_flt AND "M00 GLB Estop"; |
|
|
|
|
|
Netzwerk 7: Monitoring pneumatics manual operation *** IF NOT #ST_MANU THEN RETURN; ELSIF #MODULE_HP AND NOT #GLB_HomPos_REg THEN "M01 Init" := TRUE; END_IF; #GLB_HomPos_REg := #MODULE_HP; IF #SUPPORT_SEQ THEN RETURN; END_IF; |
|
|
|
|
|
Netzwerk 8: MD12 Gripper fingers 1+2 axis - execute #MD12.CmdExe_slow_fast_WP := "HMI KEY".P01.MD_12.F12_Enable_WP AND NOT "HMI KEY".P01.MD_12.F21_HALT_GoToPos AND #MD12.CmdExe_slow_WP;
#MD12.CmdExe_slow_fast_HP := "HMI KEY".P01.MD_12.F11_Enable_HP AND NOT "HMI KEY".P01.MD_12.F21_HALT_GoToPos AND #MD12.CmdExe_slow_HP; |
|
|
|
|
|
Netzwerk 9: MD34 Gripper fingers 3+4 axis - execute #MD34.CmdExe_slow_fast_WP := "HMI KEY".P01.MD_34.F12_Enable_WP AND NOT "HMI KEY".P01.MD_34.F21_HALT_GoToPos AND #MD34.CmdExe_slow_WP;
#MD34.CmdExe_slow_fast_HP := "HMI KEY".P01.MD_34.F11_Enable_HP AND NOT "HMI KEY".P01.MD_34.F21_HALT_GoToPos AND #MD34.CmdExe_slow_HP; |
|
|
|
|
|
Netzwerk 10: V90_X Gripper linear Xaxis - execute #V90_X.CmdExe_slow_fast_WP := "HMI KEY".P01.V90_X.F12_Enable_WP AND NOT "HMI KEY".P01.V90_X.F21_HALT_GoToPos AND #V90_X.CmdExe_slow_WP;
#V90_X.CmdExe_slow_fast_HP := "HMI KEY".P01.V90_X.F11_Enable_HP AND NOT "HMI KEY".P01.V90_X.F21_HALT_GoToPos AND #V90_X.CmdExe_slow_HP; |
|
|
|
|
|
Netzwerk 11: V90_Y Gripper linear Xaxis - execute #V90_Y.CmdExe_slow_fast_WP := "HMI KEY".P01.V90_Y.F12_Enable_WP AND NOT "HMI KEY".P01.V90_Y.F21_HALT_GoToPos AND #V90_Y.CmdExe_slow_WP;
#V90_Y.CmdExe_slow_fast_HP := "HMI KEY".P01.V90_Y.F11_Enable_HP AND NOT "HMI KEY".P01.V90_Y.F21_HALT_GoToPos AND #V90_Y.CmdExe_slow_HP; |
|
|
|
|
|
Netzwerk 12: V90_Z Gripper linear Xaxis - execute #V90_Z.CmdExe_slow_fast_WP := "HMI KEY".P01.V90_Z.F12_Enable_WP AND NOT "HMI KEY".P01.V90_Z.F21_HALT_GoToPos AND #V90_Z.CmdExe_slow_WP;
#V90_Z.CmdExe_slow_fast_HP := "HMI KEY".P01.V90_Z.F11_Enable_HP AND NOT "HMI KEY".P01.V90_Z.F21_HALT_GoToPos AND #V90_Z.CmdExe_slow_HP; |
|
|
|
|
|
Netzwerk 13: C01 Lifting gate - execute "DI OUT P01".C01.VLV_O.CmdExe_WP := "HMI KEY".P01.C01.F12_Enable_WP AND NOT "HMI KEY".P01.C01.F1_HP AND ("HMI KEY".P01.C01.F2_WP OR "DI OUT P01".C01.FB_WP);
"DI OUT P01".C01.VLV_O.CmdExe_HP := "HMI KEY".P01.C01.F11_Enable_HP AND NOT "HMI KEY".P01.C01.F2_WP AND ("HMI KEY".P01.C01.F1_HP OR "DI OUT P01".C01.FB_HP); |
|